


Borunte BRTIRUS0805A Flexible small pick up robot
คำอธิบายสินค้าแบบย่อ
MODEL : BRTIRUS0805A
PRODUCT DETAILS
BRTIRUS0805A type robot is a six-axis robot developed by BORUNTE. The whole operation system is simple, compact structure high position accurancy and has good dynamic performance. The load ability is 5kg, especially suitable for injection molding, taking, stamping, handling, loading and unloading, assembly etc. It is suitable for injection molding machine range from 30T-250T. The protection grade reches IP54 at the wrist and IP40 at the body. The repeat positioning accurancy is ±0.05mm.
Main Specification
Arm Length (mm) : 940
Repeatability (mm) : ±0.05mm
Loading Ability (kg) : 5
Power Source (kVA) : 3.67
Weight (kg) : About 53
| Item | Range | Max.speed | |
| Arm | J1 | ±170° | 237°/s |
| J2 | -98°/+80° | 267°/s | |
| J3 | -80°/+95° | 370°/s | |
| Wrist | J4 | ±180° | 337°/s |
| J5 | ±120° | 600°/s | |
| J6 | ±360° | 588°/s | |
Product parameter(specification)
| Model | Arm Length(mm) | Loading ability(KG) | Repeatability(mm) | Power Source(KVA) | Net Weight(KG) |
| BRTIRUS0805A | 940 | 5 | ±0.05 | 3.67 | About 53 |
Product feature and application
The main motion of the robot is controlled by all electric control. The system uses AC motor as the driving source, special AC motor servo controller as the lower computer and industrial control computer as the upper computer. The whole system adopts the control strategy of distributed control.
Composition of mechanical system
Six axis robot mechanical system is composed of six axis mechanical body. The mechanical body is composed of J0 base part, second axis body part, second and third axis connecting rod part, third and fourth axis body part, fourth and fifth axis connecting cylinder part, fifth axis body part and sixth axis body part. There are six motors that can drive six joints and realize different motion modes. Figure 4 shows the requirements of the components and joints of the six axis robot.
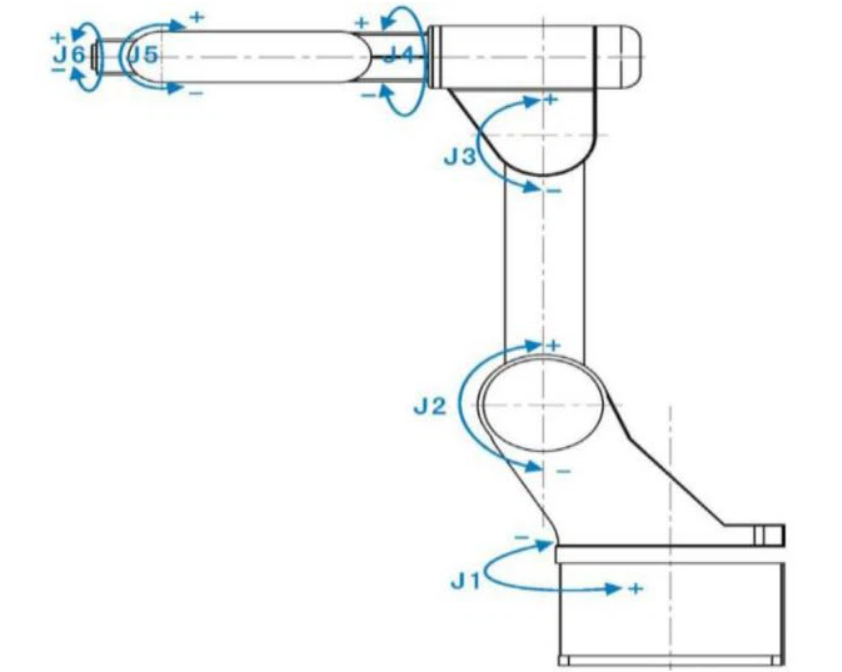
Figure 4 Mechanical system composition diagram of robot (six axes)



